
CCBR Humanoid Collaboratory
The first student-run, fully open-source legged robotics collaboration.
Founded at ICRA 2025 by students at Caltech, Columbia, Berkeley, and Rutgers.
A quick integration test of a moving quadruped leg, using the Unitree GO-M8010-6 motors.
Designed and built by CCBR.
A custom-built actuator in motion, based on the MIT Mini Cheetah.
Designed by Nachum Twersky. Built by CCBR.

Three custom-built actuators, based on the MIT Mini Cheetah.
Designed by Nachum Twersky. Built by CCBR. Photo: Ryan Rudes.
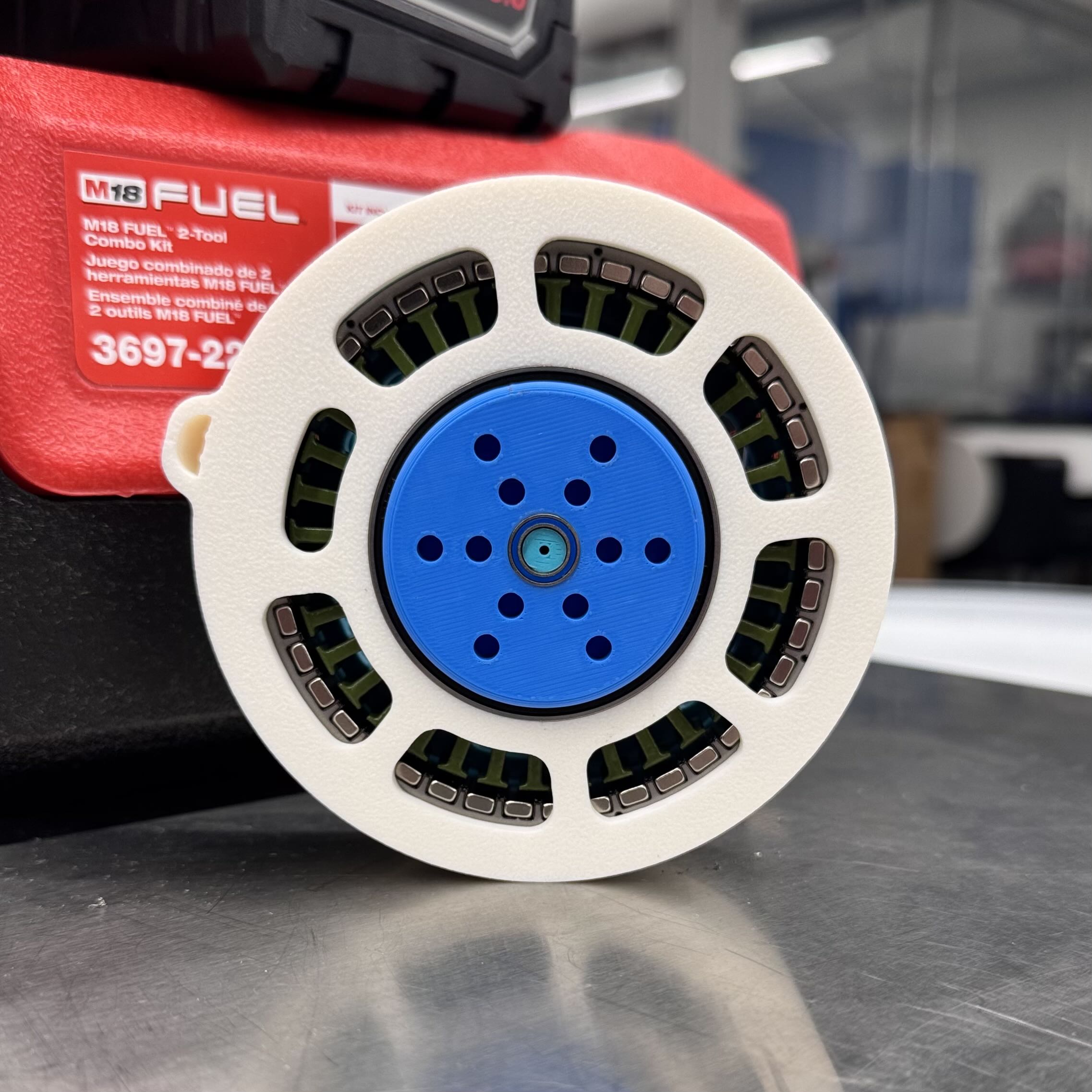
The outside of a custom-built actuator, based on the MIT Mini Cheetah (before stator winding).
Designed by Nachum Twersky. Built by CCBR. Photo: Ryan Rudes.

The internals of a custom-built actuator, based on the MIT Mini Cheetah (before stator winding).
Designed by Nachum Twersky. Built by CCBR. Photo: Ryan Rudes.